Unsere Industrierobotik
Unsere Produkte wurden entwickelt, um die modernsten Anforderungen der Industrie zu erfüllen. Sie sind vielseitig und zuverlässig und für eine Vielzahl von Anwendungen geeignet: Sortierung, Montage, Kleberauftrag, Inspektion, Be- und Entladen, Verpackung, Entgraten und vieles mehr.
Hochpräzise Bewegung an vorgegebenen Positionen mit Koordinatenwerten. Bearbeitungs- und Montagefehler des Roboters, Nullpunktfehler der Gelenkwinkelsensoren und Armauslenkung werden, dank der auf das virtuelle Modell kalibrierten Werkseinstellungen, minimiert.
Sie begrenzt Schäden an Werkzeug und Werkstück und, im Falle einer Kollision, fordert das Anhalten des Robotes auf. Diese Funktion ist unabhängig von externen Sensoren und ihre Empfindlichkeit kann je nach Anwendung, die eine Kraftanwendung erfordert, angepasst werden.
Kalibrierung von Förderern und Greifern für hohe Greifgenauigkeit. Das System unterstützt Cognex- und McMaster-Kameras oder jede andere Kamera, die TCP/IP unterstützt.
Konfiguration von bis zu vier externen Achsen, linear oder rotierend, unabhängig von den Roboterachsen. Jede Achse kann als unabhängige oder interpolierte, synchrone oder asynchrone Achse konfiguriert und vom Programm umgeschaltet werden.
Die einfache grafische Schnittstelle für die erweiterte Palettierung besteht aus einschichtigen Layoutstilen, einschließlich Reihe, Spalte, Gruppe und Pinwheel, in einer anpassbaren Reihenfolge. Durch virtuelle Simulation können Einzelfälle und Erreichbarkeit kontrolliert werden.
Schnittstelle für die Gerätekonfiguration und Unterprogramme für verschiedene Marken von Schweißgeräten. Ausserdem unterstützt es auch verschiedene Bindungsarten, wie Dreieck, Sinus, Figur 8 und Kreis. Die grafische Oberfläche bietet eine klare Führung durch die Programmoberfläche.
SCARA-Roboter
Die SCARA-Roboter von Efort Robotics decken Nutzlasten zwischen 3 und 10 kg ab, mit einer Ausdehnung von 400 ~ 800 mm und einer Wiederholgenauigkeit von ±0,01 ~ ±0,02 mm auf den Achsen J1+J2, ±0,01 mm auf Achse J3 und ±0,01° auf Achse J4.
STÄRKEN
Hohe Zuverlässigkeit, hohe Verarbeitungsgeschwindigkeit, hoher Schutz.
ANWENDUNGEN
Handhabung, Zuführung, Montage.
Allgemeine Industrie, Maschinenbau, Formenbau, Kunststoffe.







Tragfähigkeit von 3 bis 10 Kilogramm
Radius zwischen 400 und 800 Millimetern
0.02mm
Wiederholbarkeit zwischen ±0,01 und ±0,02 Millimetern
Kleine Roboter
Die Kleinroboter von Efort Robotics decken Nutzlasten zwischen 8 und 12 kg mit einer Ausdehnung von 593 ~ 2025 mm und einer Wiederholgenauigkeit von ±0,02 ~ ±0,03 mm ab.
STÄRKEN
Effizient, präzise, bedienfreundlich, stabil, kompakt.
ANWENDUNGEN
Sortieren, Montieren, Kleber auftragen, Prüfen, Be- und Entladen, Verpacken, Entgraten und mehr.
Metallverarbeitung, Elektronik, Verpackungen für die Lebensmittelindustrie Pharmaindustrie, Logistiklager.








Tragfähigkeit von 8 bis 12 Kilogramm
Radius zwischen 593 und 2025 Millimetern
0.003mm
Wiederholbarkeit zwischen ±0,02 und ±0,03 Millimetern
Lichtbogenschweißen
Die Lichtbogenschweißroboter von Efort Robotics decken Lasten zwischen 10 und 15 kg ab, mit einem Radius: 1400 ~ 2000 mm und einer Wiederholgenauigkeit: ±0,03 mm.
STÄRKEN
Hoher Schutz, hoher Durchsatz, hohe Zuverlässigkeit.
ANWENDUNGEN
Handhabung, Montage, Maschinenbedienung, Polieren, Beschichten, Entgraten und andere Anwendungen.
Automobilbau, Sanitärtechnik, Photovoltaik, Elektronik, Gießereiwesen.


Tragfähigkeit von 10 bis 15 Kilogramm
Radius zwischen 1400 und 2000 Millimetern
0.03mm
Wiederholbarkeit von ±0,03 Millimetern
Mittelgroße Roboter
Die mittleren und Lichtbogen-Schweissroboter von Efort Robotics decken Lasten zwischen 10 und 35 kg ab, mit einer Ausdehnung von 1143 ~ 2295 mm und einer Wiederholgenauigkeit von ±0,03 ~ ±0,05 mm.
STÄRKEN
Hoher Schutz, hohe Produktivität, hohe Zuverlässigkeit.
ANWENDUNGEN
Handhabung, Montage, Maschinenzuführung, Polieren, Beschichten, Entgraten und andere Anwendungen.
Automobil, Sanitär, Photovoltaik, Elektronik, Formenbau.




Tragfähigkeit von 10 bis 35 Kilogramm
Radius zwischen 1143 und 2295 Millimetern
0.005mm
Wiederholbarkeit zwischen ±0,03 und ±0,05 Millimetern
Palettierroboter
Die Palettierroboter von Efort Robotics decken Lasten zwischen 130 und 180 kg ab, mit einem Radius: 2800 ~ 3200 mm und einer Wiederholgenauigkeit: ±0,1 mm.
STÄRKEN
Hohe Überlast, hoher Durchsatz, hoher Takt, hohe Zuverlässigkeit.
ANWENDUNGEN
Metallverarbeitung, Be- und Entladen, Schleifen, Schweißen, Handhabung und andere Anwendungen.
Automobilbau, Sanitärtechnik, Photovoltaik, Elektronik, Gießereiwesen.


Tragfähigkeit von 130 bis 180 Kilogramm
Armlänge zwischen 2800 ~ 3200 mm.
0.1mm
Wiederholbarkeit von ±0,1 Millimetern
Roboter für hohe Lasten
Die Hochlast- und Palettierroboter von Efort Robotics decken Lasten zwischen 50 und 210 kg ab, mit einer Ausdehnung von 2146 ~ 3160 mm und einer Wiederholgenauigkeit von ±0,06 ~ ±0,1 mm.
STÄRKEN
Hohe Überlast, hoher Schutz, hohe Produktivität, hohe Zuverlässigkeit.
ANWENDUNGEN
Mechanische Bearbeitung, Be- und Entladen, Schleifen, Schweißen, Handhabung und mehr.
Automobil, Sanitär, Photovoltaik, Elektronik, Formenbau.






Tragfähigkeit von 50 bis 210 Kilogramm
Radius zwischen 2146 und 3160 Millimetern.
0.01mm
Wiederholbarkeit zwischen ±0,06 und ±0,1 Millimetern
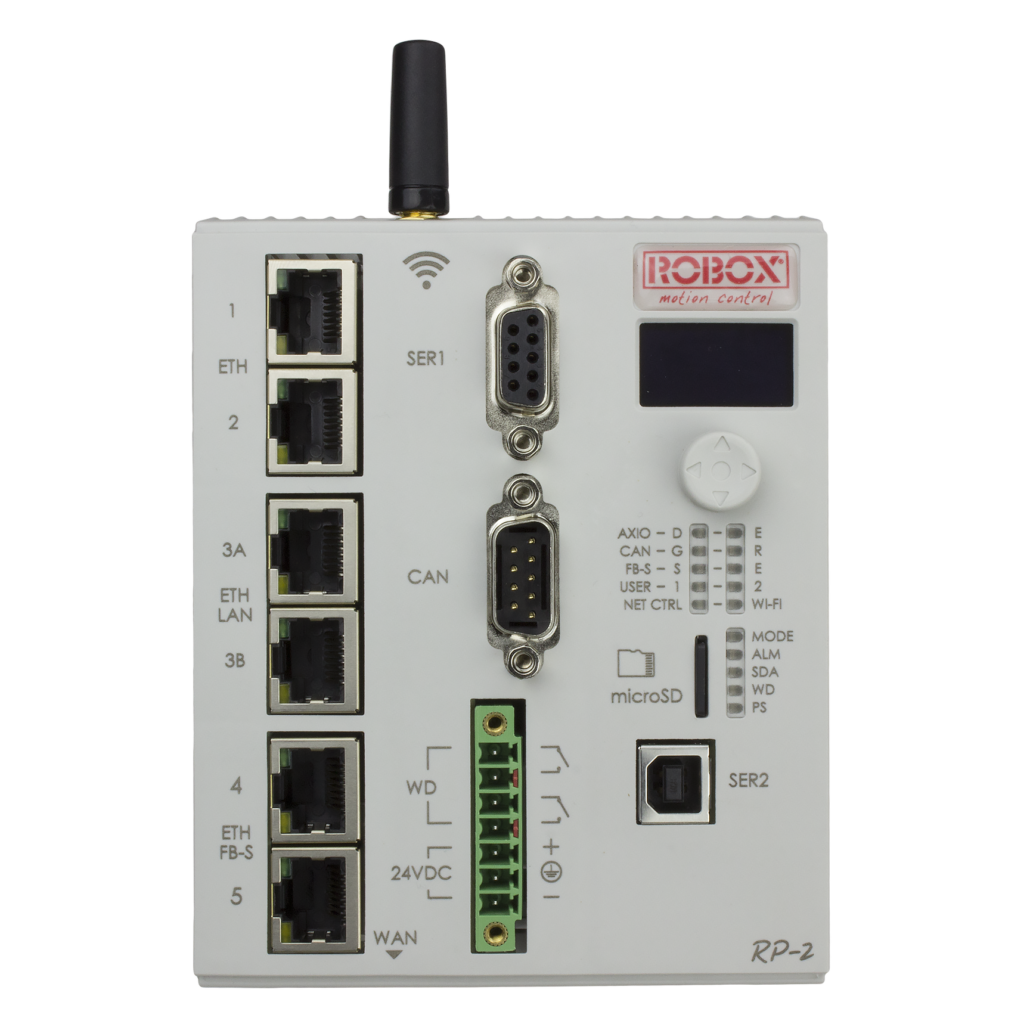
RP-2 (Profinet slave) | AS1018.012
Achsensteuerung – ausgestattet mit einer ARM Cortex A9 Dual Core CPU (800MHz), die bis zu 32 interpolierte Achsen verarbeiten kann und über den EtherCAT-Feldbus gesteuert wird. Mit der Möglichkeit einer Profinet-Anbindung.
HAUPTMERKMALE